Mobile Robotics Project – Thymio Navigation
Dec 7, 2023
- Grade: 5.75 / 6
TL;DR
- Built an autonomous navigation system for the Thymio robot.
- Integrated computer vision, path planning, motion control, local obstacle avoidance, and Kalman filter sensor fusion.
- Achieved robust trajectory following even under disturbances (kidnapping, goal relocation, camera loss).
- Graded 5.75 / 6 in the EPFL Mobile Robotics course.
At a glance
- Role: Robotics engineer (team of 3)
- Timeline: Oct–Dec 2023 (7 weeks)
- Context: EPFL Mobile Robotics course project
- Users/Stakeholders: Students, robotics researchers, course staff
- My scope: Vision system, Kalman filter integration, evaluation
Problem
Robots must navigate in dynamic, uncertain environments, where GPS may not constantly be available and sensors are noisy. Challenges we addressed:
- Localizing the robot robustly despite drift and noise.
- Planning safe global paths while adapting to sudden changes.
- Avoiding unseen obstacles in real time.
- Handling disturbances like robot kidnapping or camera failure.
The key question: How can a small mobile robot combine vision, planning, and sensor fusion to achieve reliable autonomy indoors?
Solution overview
We designed a modular navigation pipeline:
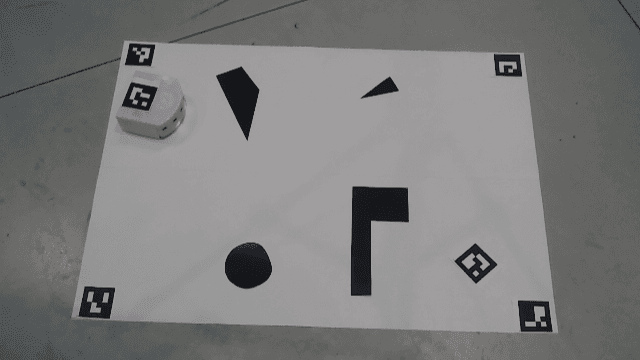
- Computer vision with ArUco markers for global localization (simulating GPS) and obstacle detection.
- Global planning using Dijkstra’s algorithm on a grid map created from vision.
- Motion control with heading/waypoint tracking.
- Local obstacle avoidance using proximity sensors.
- Sensor fusion with a Kalman filter for robustness.
Architecture
- Inputs: Camera feed + onboard odometry/proximity sensors.
- Modules: Vision → Path Planner → Motion Controller → Local Navigation → Kalman Filter.
- Outputs: Actuation commands to the Thymio (rotation, translation).
Data
- Inputs:
- Overhead camera stream with ArUco markers for robot, obstacles, and goals.
- Onboard proximity sensors for obstacle detection.
- Wheel odometry for dead-reckoning.
- Grid map: Discretized 2D environment built dynamically from vision.
- Disturbances: Robot displacement, goal teleportation, and temporary vision loss tested.
Method
1. Vision System
- ArUco detection for robot, goal, and obstacles.
- Preprocessing via grayscale + thresholding.
- 2D occupancy grid map generation.
- Real-time updates for dynamic environments.
2. Global Navigation
- Dijkstra’s algorithm for shortest path search.
- Waypoint discretization for smooth paths.
- Continuous replanning when environment or goal changes.
3. Motion Control
- Heading computed relative to next waypoint.
- Rotation + translation commands adapted to wrap-around angles.
- Smooth transitions between waypoints.
4. Local Navigation (Obstacle Avoidance)
- Proximity sensors detect obstacles unseen by vision.
- Behavior-based responses: stop, rotate, or detour.
- Local avoidance integrated seamlessly into global planning.
5. Kalman Filter (Sensor Fusion)
- Prediction step: wheel odometry.
- Update step: camera-based localization.
- Reduces noise, compensates drift, and smooths orientation jumps.
- Keeps predicting during camera outages.
Experiments & Results
- Trajectory following: Robot reached goals across cluttered maps with high reliability.
- Dynamic robustness: Recovered from kidnapping (manual relocation) and goal relocation.
- Camera loss: Kalman filter maintained stable pose estimates.
- Obstacle avoidance: Robot rerouted safely in real time when encountering unexpected obstacles.
Impact
- Demonstrated how vision + planning + sensor fusion enables robust autonomy on small robots.
- Created a demo for EPFL’s Mobile Robotics course.
What I learned
- Importance of modular system design in robotics.
- Hands-on experience with Kalman filtering and multi-sensor fusion.
- Trade-offs between global planning and local avoidance.
- Debugging challenges in real-time embedded robotics.
Future Work
- Add multi-robot coordination (swarm planning).
- Extend to larger maps with SLAM techniques.
- Improve motion control with PID or MPC for smoother trajectories.
- Introduce dynamic obstacle tracking via computer vision.
References
- EPFL Mobile Robotics course materials.
- OpenCV ArUco marker detection docs.
- Thymio robot official documentation.
- Thrun et al., Probabilistic Robotics.